

A 3D Vision Based Approach for Optimal Grasp of Vacuum Grippers
En general el enfoque del agarre de los brazos roboticos están basados en el uso de pinzas de múltiples dedos. En caso de querer agarrar objetos de gran tamaño es conveniente utilizar pizas de vacio.
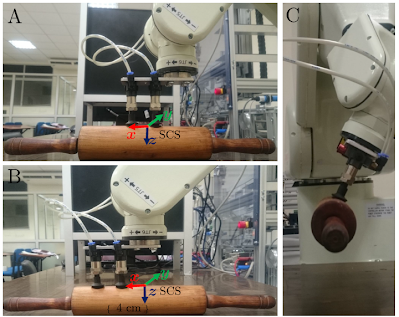
Punto de agarre óptimo
Este publicación tiene como objetivo estimar el mejor punto de agarre para una pinza de vacío de dos ventosas (se consideran objetos planos con un tamaño y geometría desconocidos). El enfoque es basado en la estimación de la forma geométrica del objeto a partir de una nube de puntos (vista 3D) de tal manera que se genera un modelo teórico para determinar el el punto de contacto mas optimo y se minimice la fuerza de vacío necesaria para garantizar la adhesión del objeto a las ventosas.
Artículo completo: Ir al artículo